
introduction - method - example - summary - achnowledgement - pdf (1Mb)
Introduction
Automated map reading detection (AMRD) is a new method which allows an orienteer with the help of an accelerometer to determine at which point of a course he was looking at the map (reading the map).
By combining this information with a GPS-recording of the route he ran, it can be analyzed how the athlete reads the map. The athlete, or the coach together with the athlete, can analyze mistakes based on this method and gain insight into the map reading process and the running concept of the runner.
Method
Main Principal
The AMRD method assumes, that the hand of the athlete is in a typical position during map reading. This position is significantly different to the position during regular running. In Graph 1 two orienteers in are shown in these typical positions. The runner on the left hand side keeps the map close to horizontal, in particular because only in this position the compass reliably points to north. In addition while reading the map the hand is kept reasonably steady.
| Map Reading | Not Map Reading |

|

|
| Graph 1 Typical map reading position (left) and running position (right). | |
The runner on the right hand side keeps her hand and the map in a typical running position. The hand moves strongly back and forth and the map can hardly be kept in a horizontal position because it would touch her body.
If the position of the hand can be determined a map reading event can be detected automatically. To do that an accelerometer is fixed to the map reading hand. The sensor moves and tilts with the hand and from the recorded motion map reading events can be recognized.
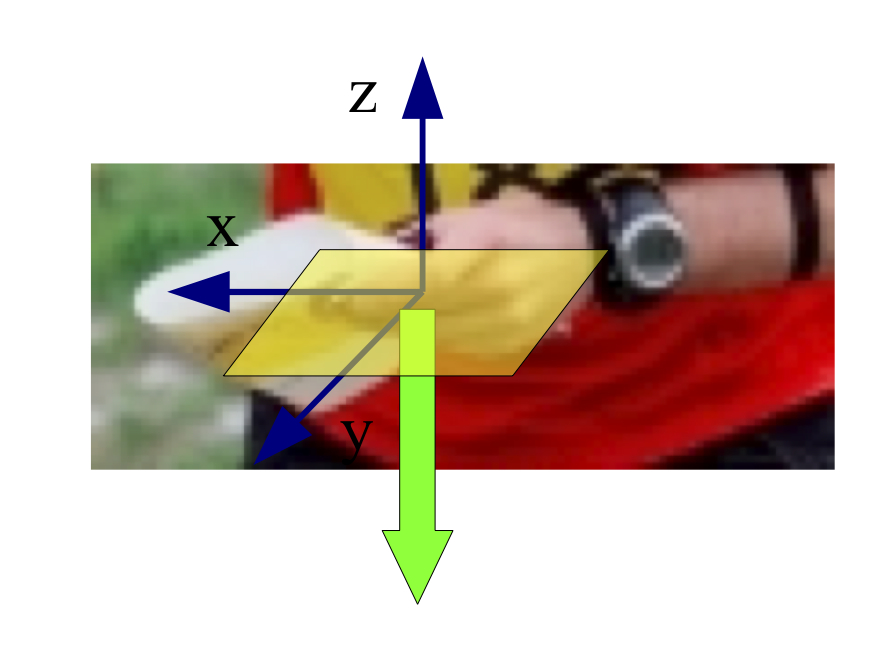
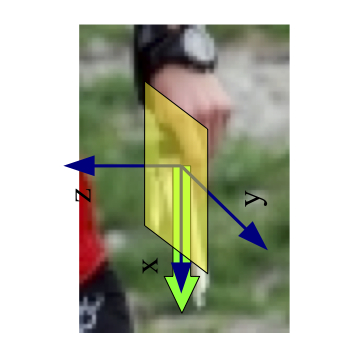
The accelerometer measures all forces acting on it. This is mainly gravity but also the acceleration forces caused by moving the hand. Gravity is shown in green in Graph 2. It can be seen that in the map reading position gravity points parallel to the the z-axis, while in the not map reading position the gravity vector is in the map plane.
| Map Reading | Not Map Reading |
|
|
| Graph 2 Coordinate system of the map while map reading (left) and running (right). | |
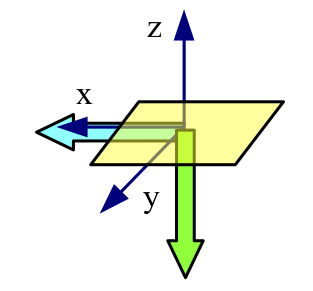
The forces acting on the sensor can be shown in the coordinate system of the map (Graph 3). The different map position while reading or not reading the map result in characteristic gravity vectors (Graph 3, left).
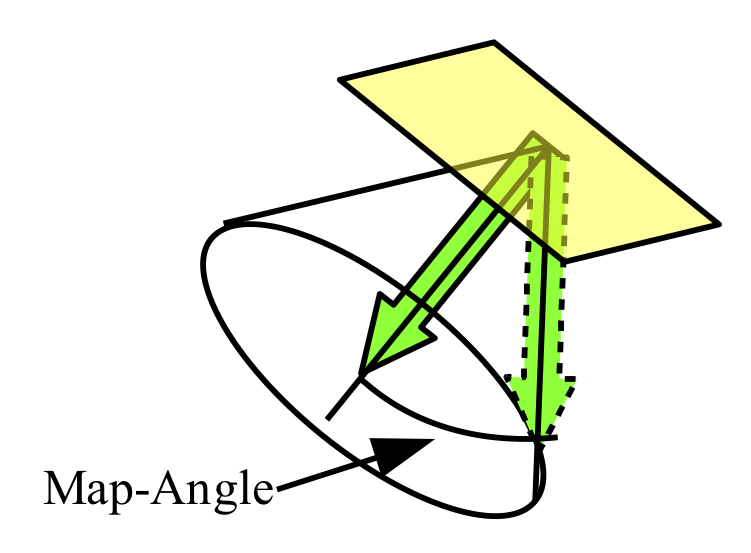
To distinguish between map reading and not map reading a map angle can be introduced. It defines the angle between the current acceleration vector and the vector perpendicular to the map, which represents the acceleration vector in the "ideal" map reading position (horizontal map). In the example on the right hand side of Graph 3 an angle of 45° is measured.
|
|
|
Graph 3 Left: Different directions of the gravity vector while map reading (green) and not map reading (cyan) in the coordinate system of the map. Right: Definition of the map angle: angle between the current acceleration vector and the acceleration vector in the ideal map reading position (perpendicular to the map). |
|
It can be assumed that the map angle during map reading is around 0°, while during not map reading it is around 90°. To distinguish between map reading and not map reading the map reading angle is defined. If the map angle is below this value the runner is reading the map, while if the map angle is above it the runner is not reading the map. The exact value of the map reading angle varies with the map reading technique of the athlete and the terrain.
Data Acquisition
Two electronic devices are needed - the accelerometer and a GPS logger. A HOBO Pendant G Data Logger (Typ UA-004-64) from Onset was used as accelerometer. Any GPS logger with reasonable spatial resolution can be used (e.g. GARMIN GPS Watches) to track the runners position.
Data Analysis
After the run the recorded data are downloaded to a computer. First the map angle at each time is calculated from the accelerometer data. This information has to be combined with the spatial information from the GPS logger. In a last step this information is graphically displayed on an orienteering map.
For the first two steps a script is provided on the website http://www.mapmania.ch/amrd. This script creates a GPX file which, in the third step, is projected onto a previously scanned orienteering map by the software Quickroute (http://www.matstroeng.se).
Example
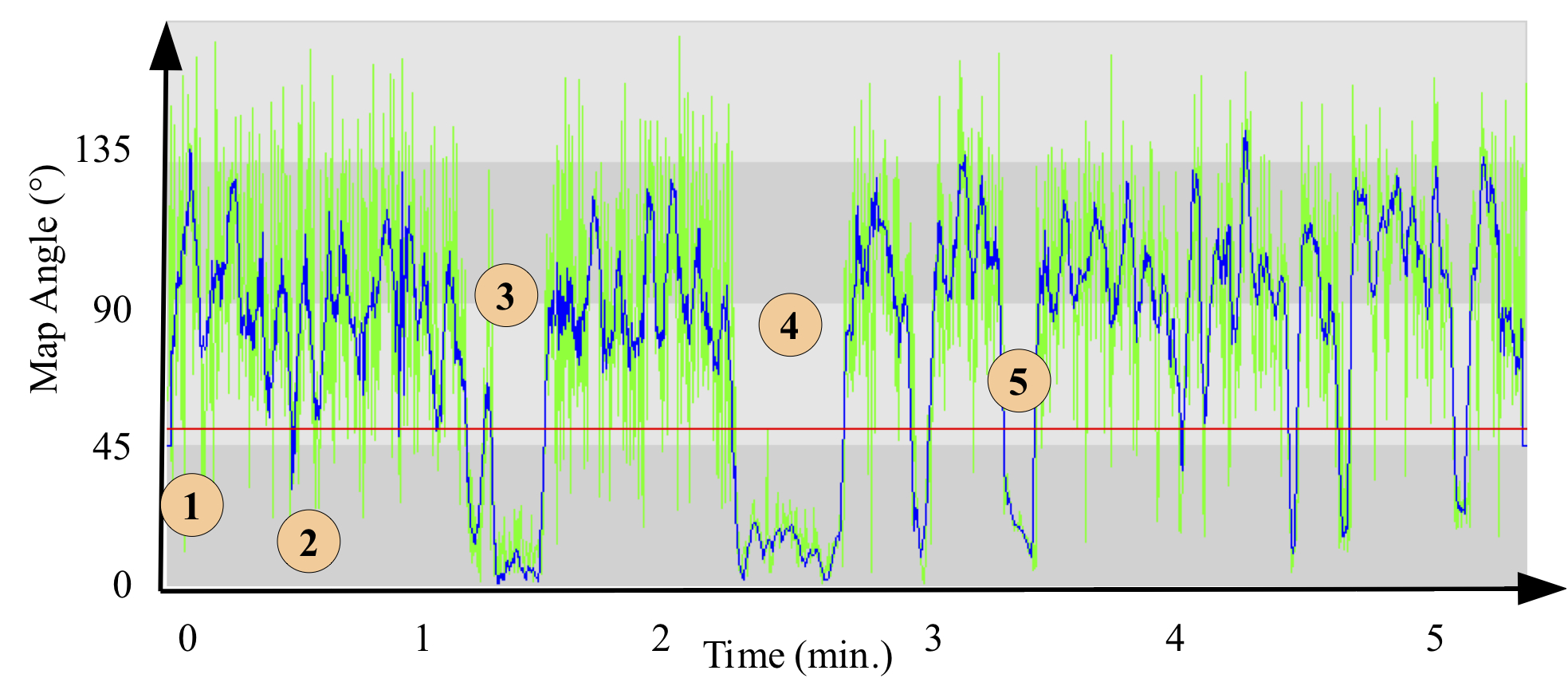
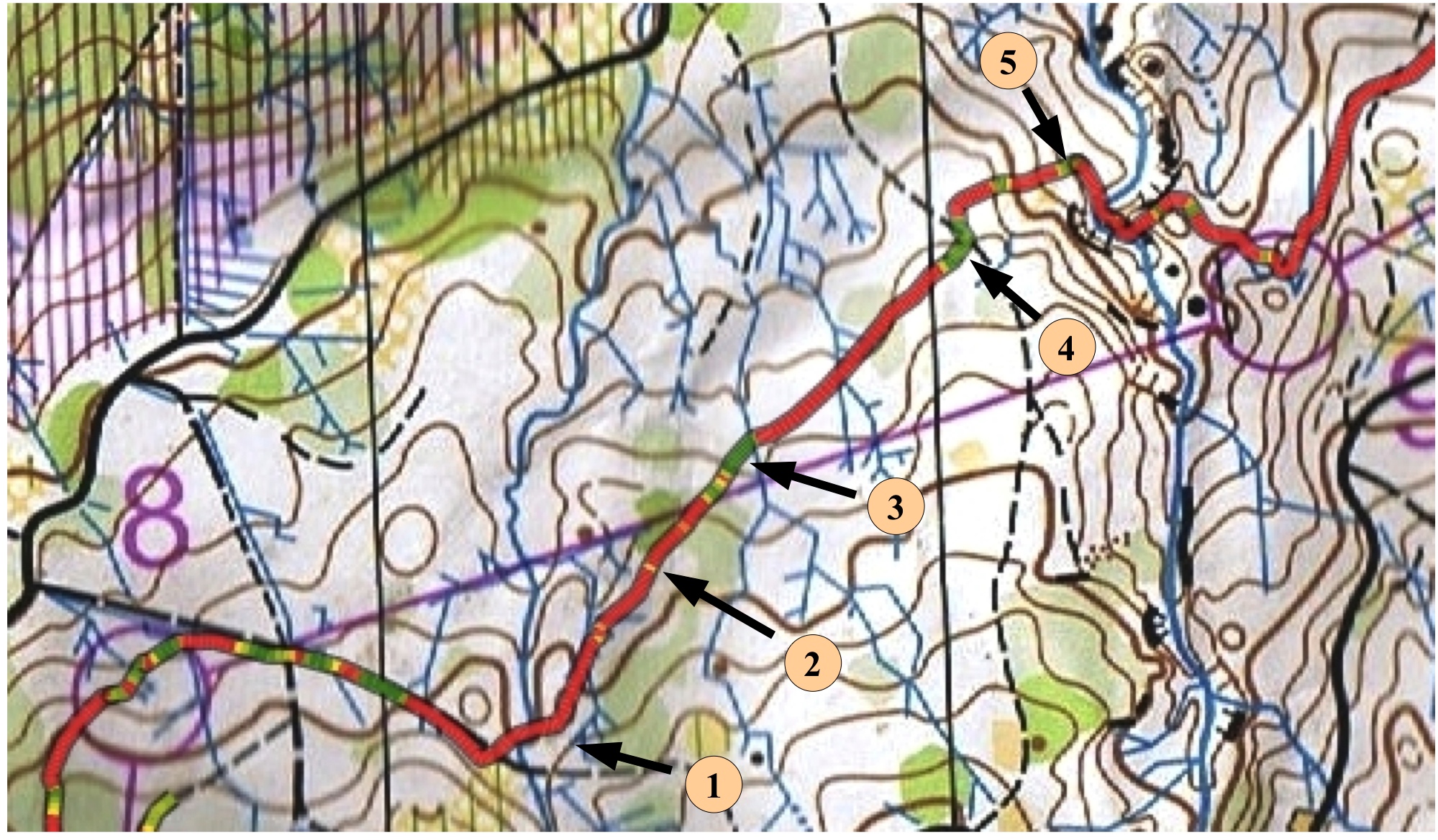
Graph 4 and 5 show an example of a leg analyzed with AMRD. Graph 4 shows the map angle while in Graph 5 the respective map section is shown. On the map the GPS track is overlaid with the map angle (color coded). Map angles below 40° are shown in green, map angles above 50° are shown in red while map angles in between are shown in orange.
|
| Graph 4 Map angle displayed versus time. The excerpt represents the example in Graph 5. It starts where the runner leaves the trail and ends when he reaches control 9. |
While leaving the trail the runner makes a direction error (1). In the first part of the off-trail section he tries multiple times to read the map (2). This is clearly visible from the orange parts of the GPS track and on the parts where the map angle falls towards 45° and rises sharply afterwards (map reading attempts). These attempts are too short (<2s) for the runner to acquire any reasonable information. Durin a slightly longer (15s) map reading event (3) the athlete fails to correct his direction and continues running to the trail (4) without any further attempts. Despite a longer map contact (25s) the runner doesn't succeed to localize. Only two stops later (5) he relocates and navigates to the control with only very short map contacts.
|
| Graph 5 AMRD analysis of a leg. © map: OLG Bern |
Summary
The analysis of trainings and competitions with AMRD allows deep insight into the map reading process of an athlete which so far has not been possible. This example demonstrates that the method works and even very short map reading events can be detected.
In comparison to current methods AMRD allows a much more focussed work on the map reading process of the athlete. Such an analysis requires a thorough examination of the technical/mental process an athlete performs in his head. The AMRD method is only a tool to localize and visualize these processes on a time-place line. The exact description of these processes, the analysis of it and the comparison with the running concept can only be done by the athlete or in collaboration with him. This will remain the main part or the post race analysis.
Acknowledgement
I would like to thank Martin Lerjen and Irene Eglin for their valuable comments and ideas while developing the method, for their beta-testing. You will find further examples and analyses on Martins blog (o-zeugs.blogspot.com - in german only).